Learn more about the ocean
DeSET to accelerate technology development for seafloor topographic mapping

summary
Less than 19% of the total area has been measured with a resolution of about 100 meters. A vast unknown area still remains on the seafloor.
Detailed seafloor topographic mapping should provide unprecedentedly useful insight into tsunami generation, migration of marine resources, climate change, seafloor earthquakes, seafloor resources such as minerals and organic matter, and cable and pipeline routes.
The Development of Seafloor Exploration Technology Project (DeSET), which supports the development of new technologies to dramatically accelerate seafloor topographic mapping, was launched in 2017 and over two phases formed a very interdisciplinary team of venture companies, researchers, and town factories from all over Japan.
In July 2020, the team was reconstituted as DeSET2020, and the following three technological developments were pursued.
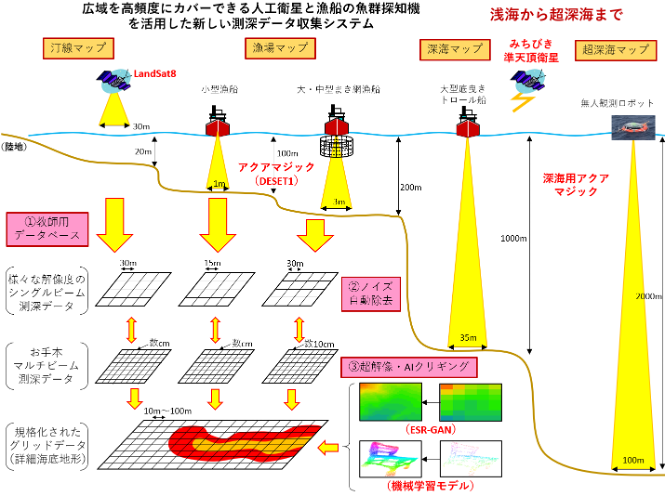
Development of an automatic detailed bathymetric mapping system using satellites, single-beam bathymetric instruments, and artificial intelligence.
Construction of a wide-area simultaneous seafloor topographic survey system.
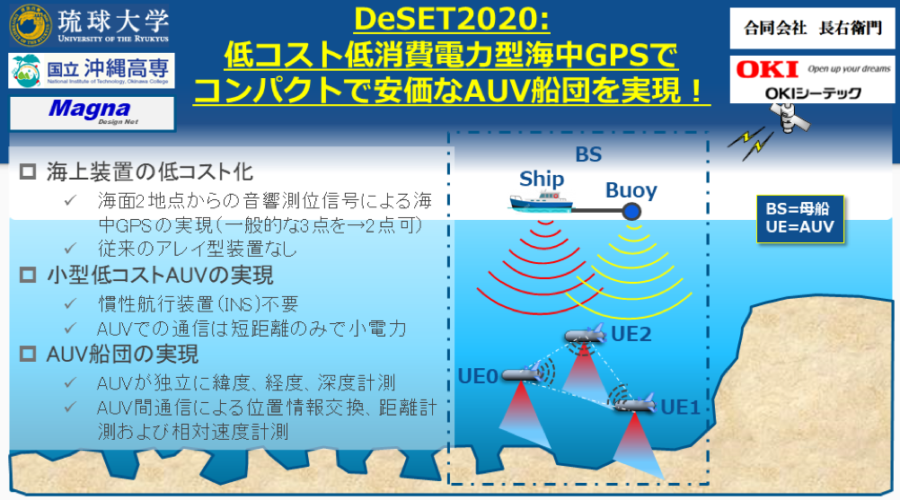
Low-cost, low-power undersea GPS for a compact and inexpensive AUV fleet."
Technical Strengths
Development of an automatic detailed seafloor topographic mapping system using satellites, single-beam bathymetry and artificial intelligence
We will construct an automatic bathymetry data collection system using satellites and single-beam bathymetry equipment that can bathymetrically survey large areas at low cost and with high frequency. In particular, single-beam bathymetry will be based on AquaMagic, which has a high-speed ultrasonic wave transmitting function, a result of DeSET2017, and will be linked with the MICHIBIKI quasi-zenith satellite positioning system to develop a high-precision bathymetric instrument for deep water areas up to 3000 m in depth. The collected bathymetric data will then be densified using the latest machine learning technology to automatically create topographic maps. Through the linkage of these systems, we aim to handle the different densities of bathymetric data in a unified manner and automatically generate high-quality bathymetric maps. As a demonstration experiment, topographic maps will be created at depths ranging from less than 20 meters to more than 2,500 meters below the surface to verify the accuracy of the depth measurements and the practicality of the automation.
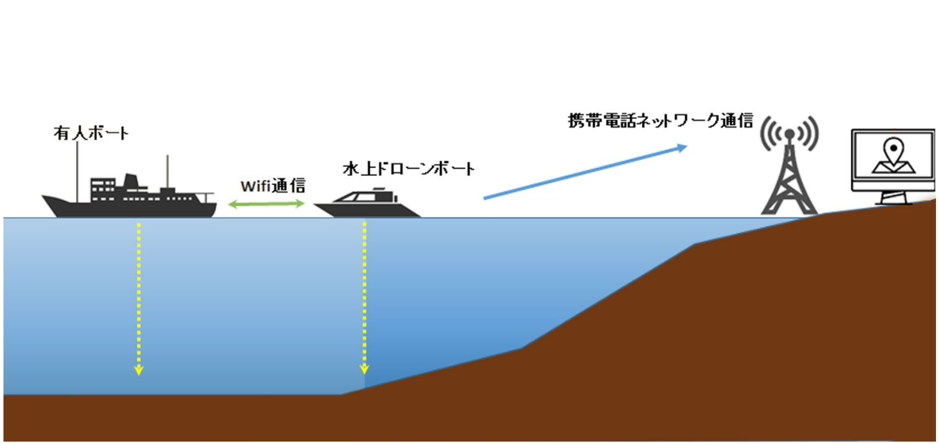
Construction of a Wide-area Simultaneous Seafloor Topographic Survey System."
By "democratizing" seafloor topographic mapping, which could only be conducted by a few surveyors, researchers, and large-scale projects due to its high level of technology and expertise, the project aims to bring out the true appeal of the ocean and add "friendliness" to it. To overcome this challenge, the following development proposals are made to "construct a wide-area simultaneous seafloor topographic survey system" using drone boats. The first is the development of a drone boat that can autonomously measure bathymetry in the ocean, the second is the development of a system that automatically integrates bathymetry information obtained by multiple drone boats, and the third is a proposal for test operations and system improvements aimed at social implementation of bathymetry maps. Through the autonomous operation of multiple drone boats, this system will significantly reduce the time, labor, and cost required for conventional surveys to less than a fraction of the time, labor, and cost required for conventional surveys, and will result in a completely new and progressive system for bathymetric mapping.
Low-cost, low-power undersea GPS for a compact and inexpensive AUV fleet
The average ocean depth is more than 3,000 m. To obtain deep-sea floor maps with high accuracy, seafloor scanning using AUV is necessary. GNSS cannot be used underwater, and inertial navigation systems and velocity measurements using Doppler velocity logs are used to determine the position. Such equipment is also large and consumes a lot of power, making AUVs large and costly.
The proposal is to transmit signals containing position and time information by GNSS with strong power into the sea from two locations, a surface mother ship and buoys towed by the mother ship. The three AUVs in the deep sea will combine (1) distance measurement by those two signals and depth measurement by a pressure gauge and (2) distance control by acoustic communication among the three AUVs to enable each (2) AUVs are made to know their positions (latitude, longitude, and depth), enabling map scanning by a fleet of small, low-power-consumption AUVs.
-
Satellite and Single Beam Bathymetry and Artificial Intelligence
Development of an automatic detailed bathymetric mapping system -
Construction of a wide-area simultaneous seafloor topography survey system
(Simultaneous Wide Area Sea Bottom Mapping System) -
Low-cost, low-power undersea GPS for a compact and inexpensive AUV fleet
LIVERNESS Corporation
- Location:
- Shinjuku-ku, Tokyo
- Website:
- https://lne.st/
- Year of establishment:
- 2002
- Contact:
- [email protected]
